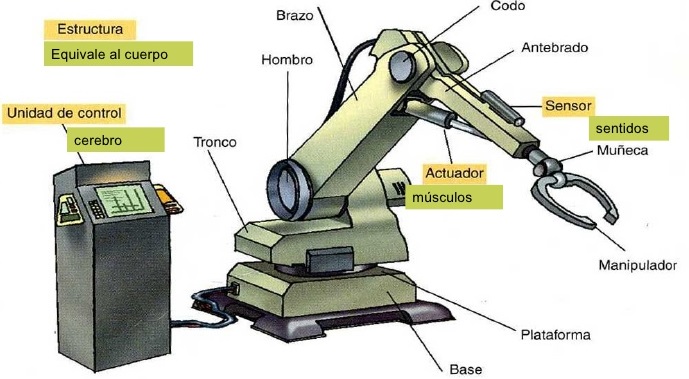
Los actuadores son los encargados de generar el movimiento de los diferentes mecanismos o elementos que conforman el robot.
Podemos encontrar diferentes tipos de actuadores pero principalmente se usan tres diferentes actuadores en robótica:
Hidráulicos:
Se utilizan en robots de gran tamaño que requieren velocidad en la ejecución de tareas repetitivas, así como una gran estabilidad y resistencia mecánica para cargas pesadas. Se clasifican en cilindros hidráulicos, motores hidráulicos y válvulas hidráulicas.

Neumáticos:
Usados en robots de pequeño tamaño y en mecanismos de accionamiento que generalmente requieren dos estados. Dentro de los actuadores neumáticos podemos distinguir entre cilindros neumáticos y motores neumáticos.

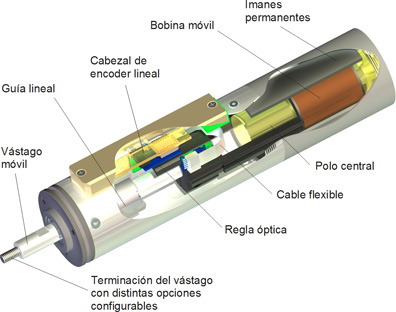
Eléctricos:
Son los más idóneos para robots que no demandan gran velocidad ni potencia, pero que si exigen exactitud y repetitividad, como es el caso de la robótica industrial. Su uso en ese sector resulta especialmente interesante por su sencilla instalación, facilidad de control y fiabilidad. Estos se clasifican en motores de corriente continua o servomotores, motores de corriente alterna y motores de paso a paso. Sus principales usos son: la robótica industrial, la cirugía robótica, el uso en ciudades inteligentes, robótica en agricultura, en drones y en robótica educativa.