Los diferentes tipos de robots.
Se suelen dividir en dos grandes grupos:
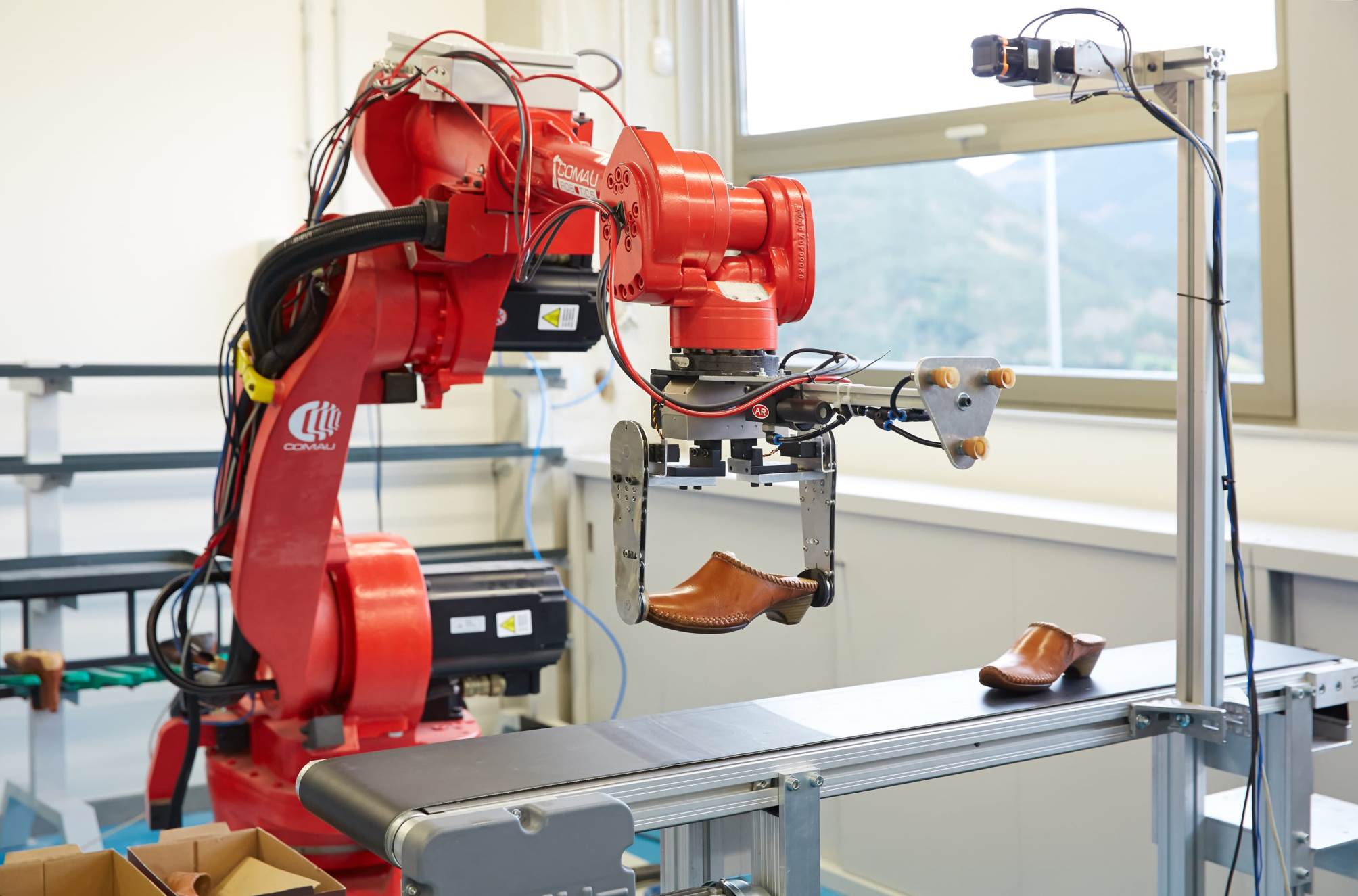
Los robots industriales. Son robots que se utilizan en un entorno de fabricación industrial. Normalmente suelen ser articulaciones o brazos desarrollados específicamente para aplicaciones como la soldadura, unión de piezas, pintura... También se pueden incluir algunos vehículos guiados de manera automática.
Los robots de servicio. Esta categoría se compone de cualquier robot que se utiliza fuera de una instalación industrial, aunque pueden ser subdivididos en los robots utilizados para trabajos profesionales y los robots utilizados para uso personal.
Dada la gran evolución y desarrollo de la robótica es necesario hace una clasificación más concreta, ya que estos son dos grupos muy amplios donde se podrían incluir otros subgrupos mucho más pequeños:
Robots domésticos o del hogar. Robots que se utilizan en el hogar. Este tipo de robots incluye muchos dispositivos diferentes, como por ejemplos aspiradoras robóticas, limpiadores de piscinas robóticos...
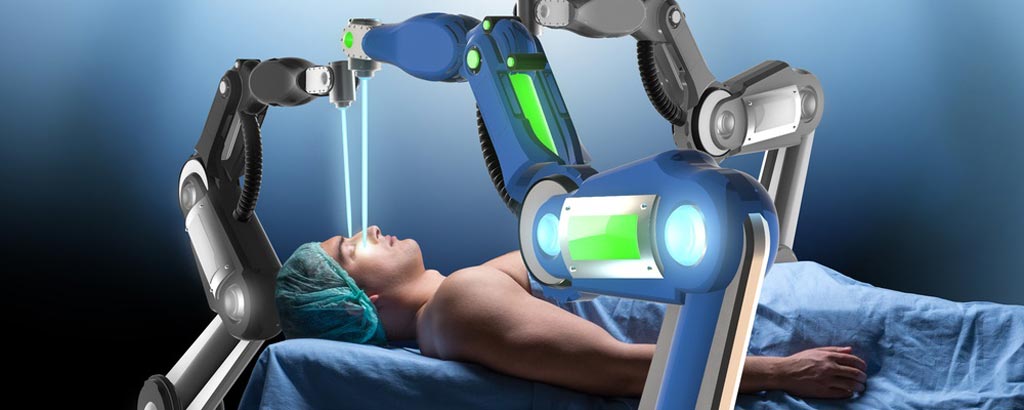
Robots médicos. Robots que se utilizan en la medicina y las instituciones médicas. En primer lugar tenemos los robots de cirugía. Además, algunos vehículos guiados automatizados y algunas máquinas para levantar personas también se pueden incluir dentro de este tipo.
Robots militares. Los robots utilizados en aplicaciones militares. Este tipo de robots incluye robots de desactivación de bombas, diferentes tipos de robots de transporte, aviones de reconocimiento.
Robots de entretenimiento. Estos son robots que se utilizan para el entretenimiento. Esta es una categoría muy amplia. Comienza con robots de juguete con simples movimientos y termina con brazos robóticos articulados usados como simuladores de movimientos.
Robots espaciales. Son los utilizados en el espacio.
Robots educacionales. Son especiales para enseñar robótica utilizado en escuelas de todo el mundo.
Robots humanoides. Robots con aspecto parecido al humano y que realizan tareas propias de un ser humano, incluso expresando emociones.
Otra clasificación puede ser en función del entorno de trabajo del robot:
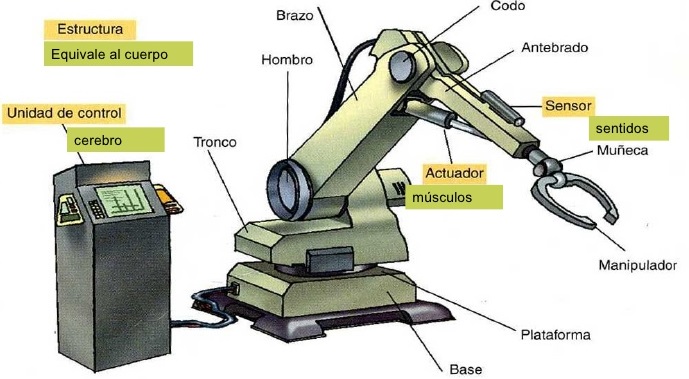
Robots estacionarios. Estos robots son fijos en un lugar y no se pueden mover. Esta categoría incluye brazos robóticos, máquinas-herramientas informáticas, y la mayoría de los robots industriales.
Robots de suelo. Estos robots están diseñados para operar en la superficie de la tierra o de otro planeta, y por lo general están subclasificados por su forma de transmisión del movimiento: ruedas, pistas o piernas.
Robots submarinos. También conocidos como vehículos submarinos autónomos, estos están diseñados para operar bajo el agua, y muchos de ellos a gran profundidad.
Robots aéreos. Son vehículos aéreos no tripulados e incluyen diversos tipos de máquinas voladoras robóticas, incluyendo aviones y helicópteros.
Robots de microgravedad. Los robots que han sido diseñados para funcionar en entornos de baja gravedad.
Robots de trabajo en entornos peligrosos. Que como su propio nombre indica se desarrollan para trabajar en sitio peligrosos, como un robot para desactivar bombas o los robots de guerra.
También se pueden clasificar en función de su autonomía:
Teleoperados. Robots controlados a distancia y que necesitan ser controlados todo el tiempo por un ser humano. Su control puede ser con cable o sin el. Un ejemplo serían los drones.
Semi-automáticos. Tiene cierto grado de autonomía, pero siguen siendo controlados por un ser humano. Un robot clasificador de paquetes podría ser semiautomático o incluso una barrera para abrirse cuando se le introduce una tarjeta (parking de coches).
Automáticos. Estos robots pueden tomar sus propias decisiones sin la necesidad de un ser humano. El más conocido últimamente podría ser el coche sin conductor.